The ezzFLOW balancer from Best Handling Technology is highly versatile. It can be combined with different end effectors and cranes, individually adapted to industrial environment, space, and task.
ezzFLOW has a park position and holds the workpiece in float so the operator can focus on the task and precision. At a welding robot this works as follows:
-
Step: The operator places small, light parts manually into the welding robot fixture.
-
Step: The fixture rotates into the shielded robot zone while the finished part from the previous cycle rotates out to the operator.
-
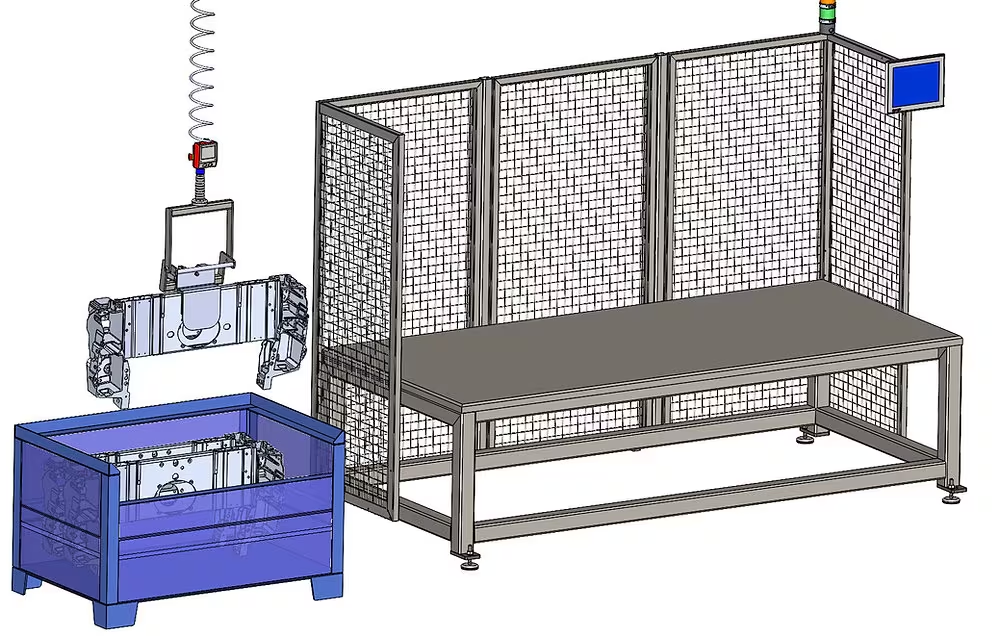
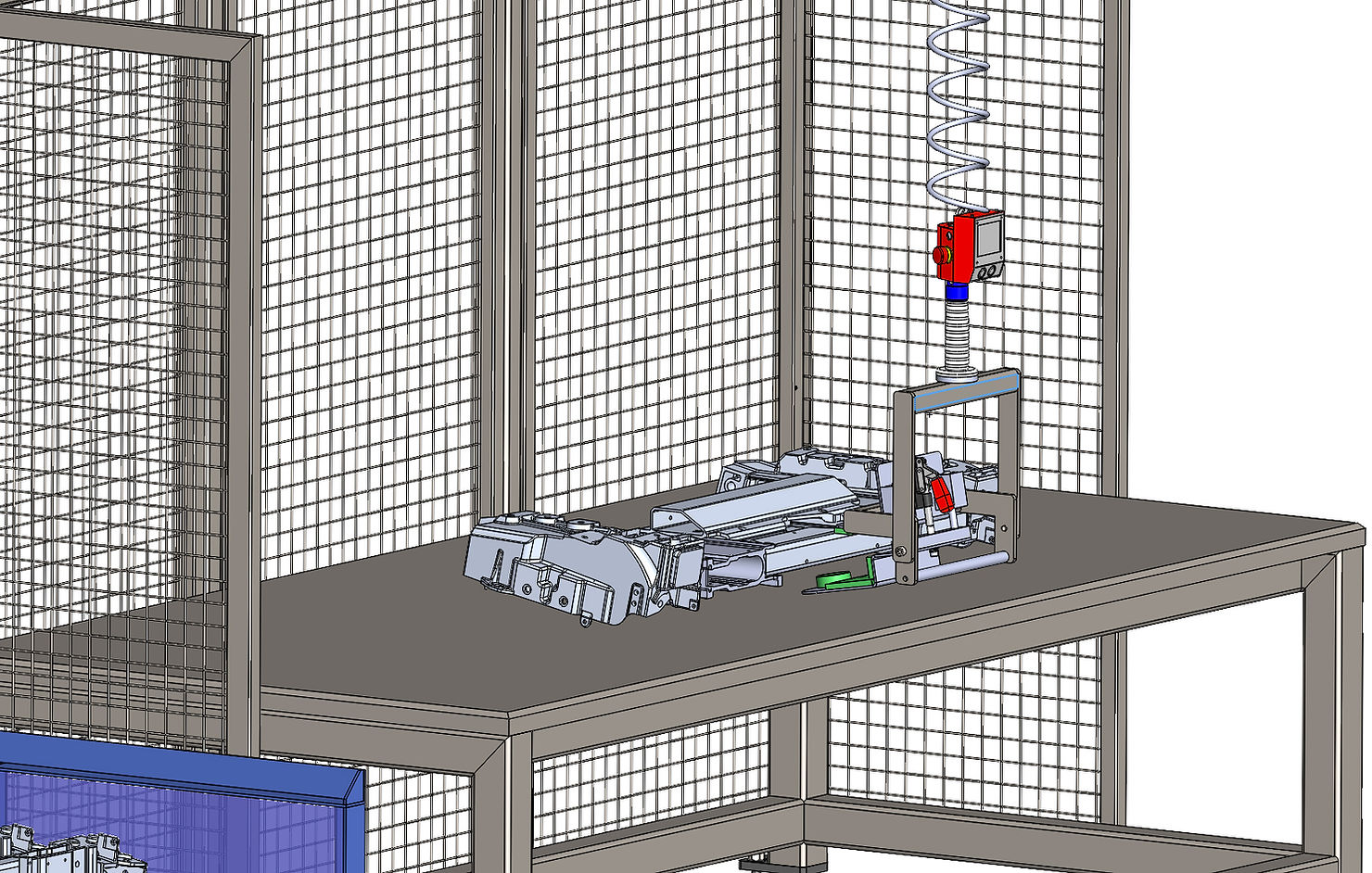
Step: The operator removes the finished part, places it in a measuring fixture, and after a good measurement places it in a container.

These steps involve a bulky, heavy part that must be handled precisely—a job for ezzFLOW. Precision matters: the part must not hit the measuring fixture, and the part itself must not be damaged.
Balancer with programming options
ezzFLOW adapts well to such applications. Programming acceleration, delay, return speeds, and rates at the on-site display gives maximum flexibility. No jerky lifting/lowering; operation is vibration-free.
ezzFLOW comes in two variants.
All variants are equipped with optimised end effectors for the task.
Besides manual assistance, ezzFLOWpneumatic as the drive is also the core of Best Handling Technology automation—fast pneumatic control, ideal for repetitive cycles.
Automation or partial automation with pneumatic linear axes is an alternative to six-axis robots—simpler and more robust. For 40 kg handling, a linear system may weigh ~200 kg; a comparable robot ~1 t.